







Enhanced comfort achieved through a stable driving experience
What is Bosch's "Vehicle Dynamics Control 2.0"?
In the cars of the future that are equipped with automated driving systems, it is important that the occupants are safe and comfortable. Motion control technology enables safe driving, as if the vehicle was chauffeur-driven by a veteran driver, and provides a comfortable ride like a "living room on wheels". This article will introduce the technologies that stabilize the vehicle for a safe, secure, and comfortable ride. Bosch's initiatives in the field will also be introduced.
Motion control for a stable driving experience
Motion control in automobiles refers to concepts and technologies that assess road surface conditions, weather, and driver operations, and maintain smooth driving by quickly controlling, on the vehicle side, the steering and tires. Motion control further enhances the safety and comfort of automobiles, and it is an essential concept for automated driving.
In recent years, Bosch has been focusing on control systems that contribute to vehicle stability by integrating and controlling various actuators with a computer, according to the driver's driving operation and speed. "Vehicle Dynamics Control 2.0" serves as the core control system for the Electronic Stability Program (ESP®), which is often referred to as Electronic Stability Control (ESC) in Japan.
Next-generation Electronic Stability Program (ESP®) through Bosch's advanced control technology
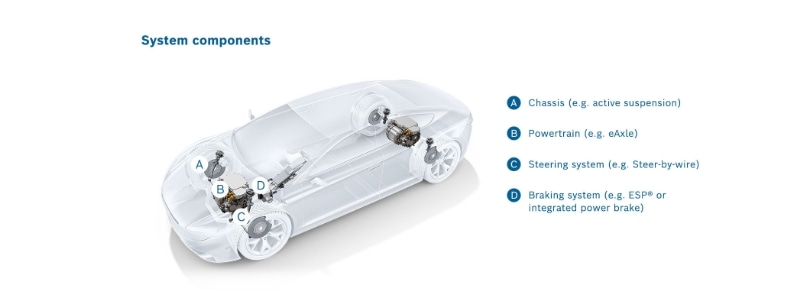
"Vehicle Dynamics Control 2.0" software developed by Bosch enables integrated control of various actuators for vehicle dynamics control, such as braking, chassis, steering, and powertrain systems.
Conventional ESP® detects skidding and then intervenes in the vehicle to restore stability, whereas Vehicle Dynamics Control 2.0 anticipates the vehicle behavior based on information from vehicle dynamics sensors.
If the risk of skidding is predicted, it proactively intervenes and applies control to support the movement of the vehicle. This increases the driver's sense of safety and confidence in the vehicle, not only in everyday handling of the vehicle but also in critical situations. The driver perceives the behavior of the vehicle as natural and in accordance with their intentions. For example, in everyday situations, such as passing through a roundabout, a driving experience matching the car's DNA can be delivered. In addition, in dangerous situations such as skidding on snowy or wet roads, the function helps to counteract them even before they are perceived as instability by the driver. During sudden evasive maneuvers or high-speed maneuvers through tight corners, Vehicle Dynamics Control 2.0 can work so inconspicuously that the driver is unaware of the presence of the system, ensuring optimal traction and stability at all times.
Vehicle Dynamics Control 2.0 is compatible with a wide range of vehicle types, including compact cars, premium cars, and light commercial vehicles, as well as for driving modes ranging from manual driving to automated driving.
How Vehicle Dynamics Control 2.0 works
Vehicle Dynamics Control 2.0 uses three main sensors: the acceleration sensor, the steering sensor, and the wheel speed sensor.
The acceleration sensor detects the amount of G (gravitational acceleration) during a turn. G is a quantity that indicates how much the speed of an object increases per velocity time when the object is in motion.
The steering sensor detects how much the driver steers (rotates) the steering wheel, and the wheel speed sensor detects the rotation of the tires with the sensor and retrieves the number of revolutions, and the driving speed can be calculated in real time.
As a control mechanism, it determines whether the vehicle is running normally based on data from dynamics sensors that detect the movement of the vehicle. If the vehicle body is slipping or skidding and there is an abnormality in G, then braking, etc. is also activated to automatically correct the vehicle body.
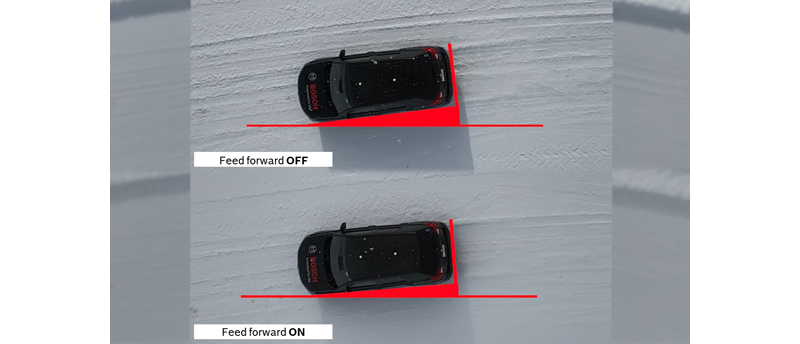
Recently, development of feedforward control is also advancing, which is faster and more efficient than feedback control using these three sensors. Feedforward control predicts in what condition the vehicle will be at the moment when the vehicle approaches a corner and the steering wheel is turned, and then controls the G.
By correcting the vehicle body based on predictions, this feedforward performs faster processing than feedback control, and aims to enable the system to intervene more smoothly.
Accelerating software development to create the mobility of the future
These motion control technologies improve safety, stability, comfort and agility. For example, the following could be commonplace in the future: cars that provide stable and comfortable rides as if chauffeur-driven by veteran drivers, robot taxis and buses that pick you up and drop you off at the specified locations, and AI that avoids congested roads and selects the optimal route to your destination.
In addition, the time may not be far off when a vehicle will be like a living room on wheels, with space that can be used freely to work on a computer, watch movies, or sleep.

*Information contained in this article is current at the time of data collection. (Published on February 20, 2023)